





































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Posts: 12
- Thank you received: 3

Auto canceling turn signal diagnosis
- wim2584
-

- Offline
- User
Less
More
05 Sep 2024 01:25 #903982
by wim2584
owner of a Kawasaki Z440, 1982.
built from two Kawasaki's 1983 gemany, and a 1982 from Netherlands.
elektrical/electronical engineer, with mechanic as hobby
Replied by wim2584 on topic Auto canceling turn signal diagnosis
I have a 440 LTD with this cancel turn system, first i had a problem (soldering), inside the switch, after repair this the self canceling was working, but not reliable (some times ok , other time not working), I changen the elektronic unit, now not working at all....
Then I decided to make myself "new: electronics " with a arduino. this works fine!!
see below the code:
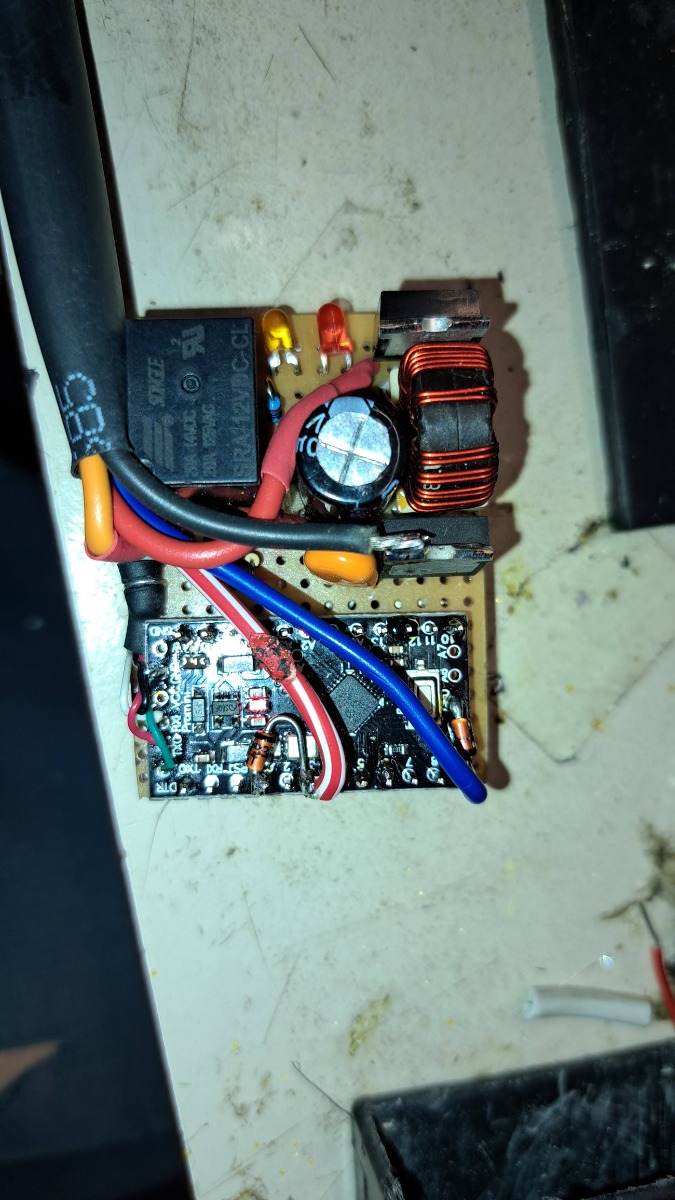 /*wim lemson FSM machine voor Kawasaki Z440 auto cancel turn signal 1-2-2024 Update 9-1-2024, nieuwe versie gemaakt, met een voedingfilter (schotky diode, spoel condensator en een 7808 met kleine condensator),verder de code aangepast en fouten eruitgehaald arduino pro mini 5V 16 Mhz 328P programmeerstekker: version 1 version 2 blauw= DTR Groen= DRT Geel=RX rood = TX arduino. (RX naar computer) paars = TX wit = RX (TX naar computer) GND naar ground (massa 12 V) Zwart = masaa werking: band voorwiel is 100/90X19 +- 2,13 Meter / omw 12 pulsen bij 1 omwenteling voorwiel (tellerkabel 3 pulsen per omwenteling) nu 300 pulsen dus 300/ 12 = 25 omw = 25x 2,13= 53 meter dus arduino vervanger knipperlicht aan, dan 4 sec wachten dan tellen 300 pulsen (53 Meter) de originele 4 sec wachten dan 50 meter iets gewijzigd, nu: 5 sex wachten en 350 pulsen (63Meter) verder als de solenoid meer dan 10 sec bekrachtigd: alles outputs uit, error rode led aan,en arduino stop, (reset noddzakelijk) knipperlicht schakelaar: wit/rood met Blauw/wit verbonden als Links of rechter knipperlicht werkt zwart naar massa al knipperlicht uit (wordt niet gebruikt in arduino vervanger */ // PIN definitions#define knipper 3#define solenoid 12#define knipperon 10#define error 6#define puls 5#define delayt 7 const int input = 9; // This is where the input is fed.int pulse = 0; // Variable for saving pulses count.int var = 0;
/*wim lemson FSM machine voor Kawasaki Z440 auto cancel turn signal 1-2-2024 Update 9-1-2024, nieuwe versie gemaakt, met een voedingfilter (schotky diode, spoel condensator en een 7808 met kleine condensator),verder de code aangepast en fouten eruitgehaald arduino pro mini 5V 16 Mhz 328P programmeerstekker: version 1 version 2 blauw= DTR Groen= DRT Geel=RX rood = TX arduino. (RX naar computer) paars = TX wit = RX (TX naar computer) GND naar ground (massa 12 V) Zwart = masaa werking: band voorwiel is 100/90X19 +- 2,13 Meter / omw 12 pulsen bij 1 omwenteling voorwiel (tellerkabel 3 pulsen per omwenteling) nu 300 pulsen dus 300/ 12 = 25 omw = 25x 2,13= 53 meter dus arduino vervanger knipperlicht aan, dan 4 sec wachten dan tellen 300 pulsen (53 Meter) de originele 4 sec wachten dan 50 meter iets gewijzigd, nu: 5 sex wachten en 350 pulsen (63Meter) verder als de solenoid meer dan 10 sec bekrachtigd: alles outputs uit, error rode led aan,en arduino stop, (reset noddzakelijk) knipperlicht schakelaar: wit/rood met Blauw/wit verbonden als Links of rechter knipperlicht werkt zwart naar massa al knipperlicht uit (wordt niet gebruikt in arduino vervanger */ // PIN definitions#define knipper 3#define solenoid 12#define knipperon 10#define error 6#define puls 5#define delayt 7 const int input = 9; // This is where the input is fed.int pulse = 0; // Variable for saving pulses count.int var = 0;
// FSM states // de diverse state van de FSM#define idle_state 0#define delay_state 10#define tel_state 20#define solenoid_state 30
// variablesint fsm_state = 0; // beschrijving timers voorbeeld(millis()-nalooptimer >= 10000?)unsigned long delaytimer;unsigned long solenoidtimer;
void setup() { // beschrijvng van de in en outputs pinMode(knipper, INPUT_PULLUP); pinMode(input, INPUT); pinMode(solenoid, OUTPUT); pinMode(knipperon, OUTPUT); pinMode(error, OUTPUT); pinMode(puls, OUTPUT); pinMode(delayt, OUTPUT); digitalWrite(delayt, LOW); Serial.begin(9600);} void loop() { if (digitalRead(knipper) == LOW) // linker of rechter knipperlicht actief? { digitalWrite(knipperon, HIGH); // als linker of rechter knipperlicht actief zet controle aan } else { digitalWrite(knipperon, LOW); // als linker of rechter knipperlicht niet actief zet controle uit } // FSM states switch (fsm_state) { case idle_state: // idle_state, wacht op knipperlicht aktie Serial.println("idle_state"); if (digitalRead(knipperon) == HIGH) // kijk of knipperon aan is { delaytimer = millis(); // start delaytimer digitalWrite(delayt, HIGH); delay(10); fsm_state = delay_state; } break; case delay_state: Serial.println("delay_state"); if (digitalRead(knipperon) == LOW) { fsm_state = idle_state; } else if (millis() - delaytimer >= 5000) { digitalWrite(delayt, LOW); pulse = 0; Serial.println("tel_state"); delay(200); fsm_state = tel_state; } break; case tel_state: if (digitalRead(knipperon) == LOW) { digitalWrite(solenoid, LOW); digitalWrite(delayt, LOW); fsm_state = idle_state; } else if (digitalRead(input) == HIGH) { digitalWrite(puls, HIGH); } else { digitalWrite(puls, LOW); digitalWrite(delayt, LOW); } if (digitalRead(input) > var) { var = 1; pulse++; Serial.println(pulse); //delay(500); } if (digitalRead(input) == 0) { var = 0; } if ((pulse) >= 350) { pulse = 0; digitalWrite(solenoid, HIGH); Serial.println("solenoid on"); digitalWrite(puls, LOW); delay(200); solenoidtimer = millis(); // start solenoid timer fsm_state = solenoid_state; } break; case solenoid_state: Serial.println("solenoid_state"); delay(300); if (digitalRead(knipperon) == LOW) { digitalWrite(solenoid, LOW); Serial.println("solenoid off"); solenoidtimer = millis(); delay(200); fsm_state = idle_state; }else if ((digitalRead(solenoid) == HIGH) && (millis() - (solenoidtimer) >= 10000)) { delay(10); digitalWrite(solenoid, LOW); delay(10); digitalWrite(puls, LOW); delay(10); digitalWrite(delayt, LOW); delay(10); digitalWrite(knipperon, LOW); delay(10); digitalWrite(error, HIGH); delay(1000); Serial.println("error timeout"); delay(1000); exit(0); // exit program, restart arduino nodig, terugzetten niet gelukt binnen de solenoid time } break; }}
Then I decided to make myself "new: electronics " with a arduino. this works fine!!
see below the code:
// FSM states // de diverse state van de FSM#define idle_state 0#define delay_state 10#define tel_state 20#define solenoid_state 30
// variablesint fsm_state = 0; // beschrijving timers voorbeeld(millis()-nalooptimer >= 10000?)unsigned long delaytimer;unsigned long solenoidtimer;
void setup() { // beschrijvng van de in en outputs pinMode(knipper, INPUT_PULLUP); pinMode(input, INPUT); pinMode(solenoid, OUTPUT); pinMode(knipperon, OUTPUT); pinMode(error, OUTPUT); pinMode(puls, OUTPUT); pinMode(delayt, OUTPUT); digitalWrite(delayt, LOW); Serial.begin(9600);} void loop() { if (digitalRead(knipper) == LOW) // linker of rechter knipperlicht actief? { digitalWrite(knipperon, HIGH); // als linker of rechter knipperlicht actief zet controle aan } else { digitalWrite(knipperon, LOW); // als linker of rechter knipperlicht niet actief zet controle uit } // FSM states switch (fsm_state) { case idle_state: // idle_state, wacht op knipperlicht aktie Serial.println("idle_state"); if (digitalRead(knipperon) == HIGH) // kijk of knipperon aan is { delaytimer = millis(); // start delaytimer digitalWrite(delayt, HIGH); delay(10); fsm_state = delay_state; } break; case delay_state: Serial.println("delay_state"); if (digitalRead(knipperon) == LOW) { fsm_state = idle_state; } else if (millis() - delaytimer >= 5000) { digitalWrite(delayt, LOW); pulse = 0; Serial.println("tel_state"); delay(200); fsm_state = tel_state; } break; case tel_state: if (digitalRead(knipperon) == LOW) { digitalWrite(solenoid, LOW); digitalWrite(delayt, LOW); fsm_state = idle_state; } else if (digitalRead(input) == HIGH) { digitalWrite(puls, HIGH); } else { digitalWrite(puls, LOW); digitalWrite(delayt, LOW); } if (digitalRead(input) > var) { var = 1; pulse++; Serial.println(pulse); //delay(500); } if (digitalRead(input) == 0) { var = 0; } if ((pulse) >= 350) { pulse = 0; digitalWrite(solenoid, HIGH); Serial.println("solenoid on"); digitalWrite(puls, LOW); delay(200); solenoidtimer = millis(); // start solenoid timer fsm_state = solenoid_state; } break; case solenoid_state: Serial.println("solenoid_state"); delay(300); if (digitalRead(knipperon) == LOW) { digitalWrite(solenoid, LOW); Serial.println("solenoid off"); solenoidtimer = millis(); delay(200); fsm_state = idle_state; }else if ((digitalRead(solenoid) == HIGH) && (millis() - (solenoidtimer) >= 10000)) { delay(10); digitalWrite(solenoid, LOW); delay(10); digitalWrite(puls, LOW); delay(10); digitalWrite(delayt, LOW); delay(10); digitalWrite(knipperon, LOW); delay(10); digitalWrite(error, HIGH); delay(1000); Serial.println("error timeout"); delay(1000); exit(0); // exit program, restart arduino nodig, terugzetten niet gelukt binnen de solenoid time } break; }}
owner of a Kawasaki Z440, 1982.
built from two Kawasaki's 1983 gemany, and a 1982 from Netherlands.
elektrical/electronical engineer, with mechanic as hobby
The following user(s) said Thank You: Wookie58
Please Log in or Create an account to join the conversation.
- wim2584
-
- Offline
- User
Less
More
- Posts: 12
- Thank you received: 3
05 Sep 2024 10:24 #903996
by wim2584
owner of a Kawasaki Z440, 1982.
built from two Kawasaki's 1983 gemany, and a 1982 from Netherlands.
elektrical/electronical engineer, with mechanic as hobby
Replied by wim2584 on topic Auto canceling turn signal diagnosis
hereby the INO (arduino) file,
I change the file name from .INO to .DOC (otherwise upload not possible), So before opening chang extension to .ino
I change the file name from .INO to .DOC (otherwise upload not possible), So before opening chang extension to .ino
owner of a Kawasaki Z440, 1982.
built from two Kawasaki's 1983 gemany, and a 1982 from Netherlands.
elektrical/electronical engineer, with mechanic as hobby
Please Log in or Create an account to join the conversation.
If you like KZR Please consider making a donation. Thank you.
KZRider is free, but not without cost.
Please consider chipping in a few bucks to help cover the cost of running the KZR servers.